Представлена двухступенчатая (разделенная) архитектура нейросетевого программного комплекса для мониторинга и прогнозирования состояния подсистем космических аппаратов, состоящая из бортовых и наземных модулей.
Введение
Космическая телеметрия – это совокупность технологий, позволяющая производить дистанционные измерения и сбор научных данных об объекте исследования (данных дистанционного зондирования Земли (ДЗЗ)) и информации о состоянии бортовых подсистем космических аппаратов (КА) для предоставления оператору или пользователю. В космической отрасли телеметрические системы являются частью командно-измерительных систем центров управления полетами (ЦУП).
Важными характеристиками любой космической системы являются надежность и устойчивость к сбоям и нештатным ситуациям [1]. Основным методом решения дан- ных проблем служит многократное резервирование аппаратных средств и программного обеспечения, но с развитием стандартов CCSDS [2] и стиранием граней между аппаратурой и программами на уровне формирования сигналов появилась возможность динамического перераспределения функций управления ЦУП и КА, что существенно повышает жизнеспособность и время функционирования орбитальных систем. При этом в соответствии со Стратегией цифровой трансформации ракетно-космической отрасли до 2025 г. и перспективой до 2030 г. для госкорпорации «Роскосмос» важной задачей является создание так называемой системы информации о техническом состоянии и надежности космических комплексов и входящих в их состав изделий [3].
Таким образом, задача интеллектуального анализа данных телеметрии бортовой аппаратуры малых КА с целью определения ее технического состояния является актуальной и востребованной. В отличие от [4] в данной разработке предполагается обработка телеметрической информации как в ЦУП, так и на борту КА. Обработка на борту позволяет снизить нагрузку на канал передачи данных, а также время реакции на нештатную ситуацию.
1. Основные подсистемы
Разрабатываемая двухступенчатая архитектура нейросетевого программного ком- плекса (НПК) для мониторинга и прогнозирования состояния подсистем КА предна- значена для выполнения следующих функций:
– мониторинга и прогнозирования состояния бортовых объектов и подсистем КА, которые основаны на нейросетевом (НС) анализе телеметрических данных, поступающих от подсистем КА;
– формирования и управления библиотекой известных нештатных ситуаций;
– возможности обновления используемых на борту для мониторинга НС-моделей;
– возможности настройки НС-модели мониторинга и прогнозирования состояния на конкретную подсистему КА;
– сохранения полученной телеметрии от многоспутниковых космических систем в единой базе данных (в рамках наземного компонента) для последующего более детального анализа в интерактивном или автоматическом режиме, а также подготовки репрезентативных выборок для переобучения нейронных сетей мониторинга и прогнозирования состояния;
– обучения искусственных нейронных сетей и их дообучения на наземном компоненте НПК в процессе функционирования.
Для обеспечения требуемых функций в составе архитектуры определены следу- ющие подсистемы:
– мониторинга состояния бортовых объектов и подсистем КА (бортовая компонента);
– подключения к датчикам КА (бортовая компонента);
– обновления НС-моделей (бортовая компонента);
– обмена данными, обеспечивающая отправку данных телеметрической информации от бортовой компоненты к наземной, передачу обновленных НС-моделей и описаний известных нештатных ситуаций от наземной компоненты к бортовой (разделена между наземной и бортовой компонентами);
– формирования и управления библиотекой известных нештатных ситуаций (наземная компонента);
– хранения телеметрической информации (наземная компонента);
– настройки нейросетевой модели мониторинга и прогнозирования состояния на конкретную подсистему КА (наземная компонента);
– обучения и дообучения НС (наземная компонента);
– мониторинга состояния бортовых объектов и подсистем КА (наземная компонента);
– прогнозирования состояния бортовых объектов и подсистем КА (наземная компонента);
– отображения данных телеметрии (наземная компонента);
– библиотека известных нештатных ситуаций (наземная компонента). Схема архитектуры НПК представлена на рисунке.
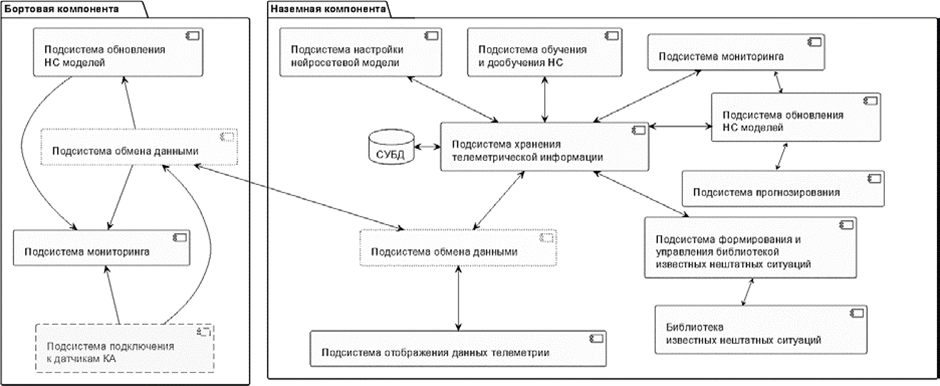
Схема архитектуры нейросетевого программного комплекса
2. Взаимодействие подсистем
Основными сценариями, реализуемыми разработанной архитектурой, являются:
– передача данных телеметрии от бортовой компоненты к наземной. Задачей данного сценария является наполнение базы телеметрической информации актуальными данными для дальнейшего ее использования при обучении и дообучении НС-моделей;
– обновление НС-моделей мониторинга и (или) прогнозирования состояния бортовых объектов и подсистем КА. Задачей данного сценария является поддержка НС-моделей в актуальном состоянии;
– мониторинг и прогнозирование состояния бортовых объектов и подсистем КА. Данный сценарий состоит из двух частей: мониторинга и прогнозирования. Задачей мониторинга является оценка текущего состояния подсистем КА, а прогнозирования – прогноз вероятного будущего состояния датчиков и подсистем КА;
– обновление библиотеки известных нештатных ситуаций. В НПК нештатные ситуации делятся на ошибки отдельных датчиков (групп датчиков) и ошибочные состояния функционирования подсистем КА.