Введение
Актуальной задачей современных информационных технологий является автоматическое распознавание различных объектов и процессов. Системы машинного обучения, искусственного интеллекта успешно решают многие задачи автоматического поиска и распознавания и достаточно хорошо решают задачу автоматического распознавания. Однако это поиск и распознание исключительно по ключу, заданному различным образом. В ключе не кодируется психологический мотив субъекта найти что-то, ибо его сложно распознать.
В сенсорной зрительной памяти человека обнаружен механизм оценки сходства формы предметов и зрительных ассоциаций. Как показали психологические исследования, зрительные ассоциации возникают не только по причине объективного сходства форм у ассоциированных предметов, но и по причине сходства субъективных карт «истории» и мотива взаимодействия человека с данными предметами. Зрительная ассоциация на увиденный предмет строится как на объективной информации сходства трехмерных предметов, так и на информации субъективного отношения к нему.
Для выявления когнитивных мотивов обучаемого нельзя обременить регистрацией с него электроэнцефалограммы (ЭЭГ), eye-track, электромиографии (TЭМГ). В то же время можно фиксировать движения руки, пальцев через вращение виртуального трехмерного объекта на экране монитора. Поскольку траекторию осмотра диктуют физика объекта, физиология зрения и когнитивный мотив, то в карте кругового осмотра объекта во временной динамике изучения объекта можно найти сегменты, определяющие когнитивный (психологический) мотив как личностный параметр пользователя.
1. Теоретическая основа выбора направлений разработки алгоритма
Человек формирует образ нового объекта с помощью специальных перцептивных приемов при его осмотре. В итоге он может совершать мысленные представления о виде объекта с разных его ракурсов и мысленные его повороты. С помощью этих перцептивных приемов формируется субъективная карта кругового осмотра 3D-объекта. Авторами была предложена следующая концептуальная модель алгоритма выявления у учащихся индивидуальных мотивов изучения 3D-моделей и методика регистрации персонализированной трехмерной карты кругового осмотра объекта, где задействуется не только визуальный, но и физиологический канал. Физиологическим каналом выступает рука. Ее моторика помогает визуальному каналу восприятия видеоинформации наносить спектрограмму на сферическую карту с записью траектории осмотра. В ходе осмотра внимание человека задерживается во времени в ракурсе осмотра пропорционально интересу человека к конкретному месту на поверхности 3D-объекта.
Топология внешних маршрутов кругового осмотра субъектом данного объекта запоминается в 3D-пространстве. Обычно форма предмета при цифровом моделировании задается поверхностью в 3D-пространстве. Дополнительно к модели предмета вокруг него в пространстве задается позиция наблюдателя, которая проектируется на описанную сферу вокруг объекта, на которой размещены N = 512 ракурсов осмотра, которые однозначно привязаны к рассматриваемому объекту. В отдельных ракурсах мозг присовокупляет к ним «фотографию» вида натуральной внешней сцены, которую наблюдателю дано было увидеть. После просмотра субъектом какого-то объекта регистрируются роза ветров и карта траектории осмотра.
2. Алгоритм распознавания индивидуальных мотивов как личностных параметров
Обучающимся предлагаются для изучения виртуальные трехмерные образовательные модели. Начало осмотра любого виртуального объекта любым наблюдателем начинается с фиксированного опорного ракурса наблюдения из 512 ракурсов. Каждый ракурс наблюдения зафиксирован своими координатами в пространстве.
Фиксируется время пребывания в каждом ракурсе наблюдения первого объекта t1¹P– время пребывания в ракурсе наблюдения 1 наблюдателем 1. Нижний индекс определяет номер ракурса наблюдения объекта, верхний – номер наблюдателя. Вычисляется полное время изучения объекта наблюдателем:
![]()
Так как время осмотра объекта может отличаться как у одного и того же наблюдателя даже при изучении одного и того же объекта, так и у разных наблюдателей, то для исключения из анализа скорости просмотра объекта наблюдателем проводим нормировку в виде вычисления доли D (процента) нахождения наблюдателя в каждом из 512 ракурсов наблюдения:
DR1RP1 P= tR1RP1 P/ TP1P, DR2RP1 P= tR2RP1 P/ TR1RP1P, … , 512P1 P= tR512RP1 P/ TR1RP1P.
Далее находим минимальное DRминRP1P (оно может быть равно 0, если наблюдатель не посещал какие-то части объекта) и максимальное DRмаксRP P и сохраняем номера ракур- сов осмотра с минимумом и максимумом.
Разбиваем полученный диапазон DRмаксRP P– DRминRP P на 16 частей и второй вариант – на 32 части. Находим значение между каналами:
DRминRP1 P+ (DRмаксRP1 P– DRминRP1P) / 16(32) – КR1R (первый канал), DRминRP1 P+ 2(DRмаксRP1 P– DRминRP1P) / 16(32) – КR2R (второй канал) и т. д.
Строим гистограмму частоты попадания DR1RP1P, DR2RP1P, … , DR512RP1P в сформированные каналы с сохранением номеров ракурсов наблюдения в каждом канале.
По аналогии производим расчет для всех наблюдателей по первому объекту T DR1RPmP, DRмакс RPmP, DRмин RPmP, где m – номер наблюдателя.
Вычисляем суммарную долю (процент) нахождения всех наблюдателей в каждом из 512 ракурсов наблюдения:
где m – число наблюдателей.
Находим средние значения![]() а также минимальное DRминRPсрP (оно может быть равно 0, если наблюдатели не посещал какие-то одни и те же части объекта) и максимальное DRмаксRPсрP и сохраняем номера ракурсов осмотра с минимумом и максимумом.
а также минимальное DRминRPсрP (оно может быть равно 0, если наблюдатели не посещал какие-то одни и те же части объекта) и максимальное DRмаксRPсрP и сохраняем номера ракурсов осмотра с минимумом и максимумом.
Разбиваем полученный диапазон DRмаксRPср P– DRминRPсрP на 16 частей и второй вариант – на 32 части. Находим значение между каналами:

Строим гистограмму частоты попадания DR1RPсрP, DR2RPсрP, …, DR512RPсрP в сформированные каналы с сохранением номеров ракурсов наблюдения в каждом канале. Таким образом, формируется обобщенный спектр притяжения внимания у всей группы наблюдателей. Данный обобщенный спектр внимания, характеризующийся 512 ракурсами осмотра, правомерно считать «психологическим рисунком» данного объекта.
Для решения задачи выявления индивидуальных особенностей объекта находим разность времени пребывания конкретного наблюдателя при осмотре конкретного объ- екта и среднего времени осмотра объекта всеми наблюдателями для каждого из 512 ракурсов наблюдения:
![]()
На основе полученных данных строится спектр индивидуальных особенностей изучения объекта наблюдателем, т. е. отличие каждого наблюдателя от среднего времени наблюдения в ракурсах наблюдения для каждого объекта.
3. Результаты исследований
Вышеописанный алгоритм был экспериментально апробирован. В эксперименте приняли участие 70 студентов. Было получено 70 карт кругового осмотра и траекторий осмотра каждого из 18 объектов. Каждому испытуемому предъявлялась на экране дисплея модель 3D-объекта, и испытуемый вращал ее рукой посредством манипулятора «мышь». В этом случае испытуемый не мог планировать какие-либо инструментальные действия с объектом, так как не имел ощущений веса объекта, центра тяжести, его агрегатного состояния, шероховатости, температуры, эластичности. Он осматривал объект, руководствуясь когнитивными мотивами, замыслами.
Испытуемого не ограничивали в продолжительности осмотра, при этом абсолют- ное время пребывания внимания испытуемого в каждой опорной точке зависело не только от распределения внимания, но и от индивидуальных скорости осмотра и продолжительности сеанса осмотра. Затем испытуемому предъявлялся для осмотра новый 3D-объект.
На рисунке показан спектр индивидуальных особенностей (спектр притяжения внимания) студента при изучении виртуальной 3D-модели молекулы органического соединения. Местоположение всплесков относительно номеров ракурсов наблюдения на оси Х в спектре индивидуальных особенностей показало, что в спектре имеются не только два-три, но и больше мест на поверхности, которые соответствуют повышенному вниманию испытуемого на поверхности 3D-карты кругового осмотра объекта. Это значит, что испытуемый выбрал эти места в качестве точек повышенного интереса.
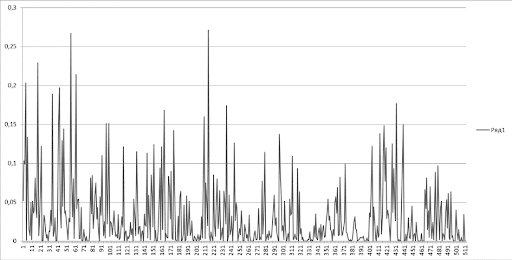
Спектр индивидуальных особенностей (спектр притяжения внимания) студента при изучении виртуальной 3D-модели молекулы органического соединения
Наилучший ракурс объекта выбирается индивидуально, но на его выбор влияют три физические характеристики 3D-объектов: шарообразные, кубообразные, сложносо- ставные, а также оказывают влияние оптические свойства поверхности объекта. Под оптическими свойствами подразумеваются эффекты, возникающие при световом воздействии на объект. Это могут быть блеск, шагрень, перламутр, которые в динамике вращения переливаются на свете, происходит зеркальное отражение каких-то поверхностей. Из-за оптических свойств объекта в зависимости от спектра освещения возникают специальные эффекты, которые свойственны только этому объекту.
Дальнейший анализ экспериментальных данных по регистрации карт круговых осмотров объектов и розы ветров позволил выявить зависимость когнитивного мотива обучающихся от физических и физиологических составляющих эксперимента, проявляющуюся в нестабильности маршрута осмотра объекта. Установлено, что вариатив- ность возникает вследствие ряда факторов: структуры объекта, физиологии руки и зрения испытуемого, сменяющихся в ходе осмотра психологических замыслов человека (посмотреть за горизонт, приблизиться к точке интереса и т. д.).
С учетом данных факторов разработан алгоритм поэтапного выделения из траек- тории осмотра и розы ветров физической и физиологической составляющих и нахождения остатка как психологической составляющей. Для компрессии вариативности данных карты кругового осмотра объекта и розы ветров была составлена логическая схема отделения (рисунок) физической и физиологической составляющей вариативности от когнитивной детерминанты. Согласно этой схеме стабильность маршрута, которая детерминируется физикой объекта, было решено выявлять путем повторения эксперимента с разными испытуемыми, но с одним и тем же объектом, а составляющую, которая определяется физиологией наблюдателя, предложено компенсировать путем повторения экспериментов с одним и тем же испытуемым, но с разными объектами.
Далее рассчитывалась индивидуальность карты кругового осмотра объекта для каждого из наблюдателей, которые формируют базу данных индивидуальных отличий осмотра объекта различными субъектами. Разработанные логическая схема и алгоритм позволили реализовать режим разделения физической и физиологической составляющих от когнитивного мотива обучающихся и найти метрики схожести объектов по характеру.
Заключение
Результаты проведенных экспериментов и статистический анализ результатов подтвердили корректную работу предложенной модели и алгоритма распознавания индивидуальных мотивов изучения как личностных параметров обучаемого. Для повышения достоверности распознавания требуется предложить дополнительный набор признаков, однозначно определяющих такую траекторию осмотра объекта, которая отражает мотивированное динамическое поведение по отношению к 3D-объекту и точкам интереса на этом объекте, и также увеличить экспериментальную выборку как объектов, так и субъектов.
Новизна предлагаемого подхода состоит в распознавании и учете «психологиче- ских» факторов более глубокого уровня, чем физиологические и физические характеристики перцептивного действия как эргономического процесса. В круговом осмотре задействуется рука или тело человека для вращения объекта. Поэтому на траекторию осмотра влияет не только луч внимания человека, но и моторика руки и тела.